Thermography Robot
Year:
2023Project Description
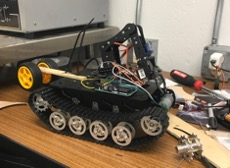
Our aim was to build a robot that could detect thermal hotspots within an obstacle course (that resembles a naval ship environment) using a Flir camera. In addition to this objective, we had to ensure that the robot could navigate and overcome obstacles that it would encounter on a naval ship: steep flights of stairs, rocking from the boat, and opening/closing doors.